

The quadruped robots are the best choice among all legged robots related to mobility and stability of locomotion. They can surpass their wheeled counterparts at traversing cluttered terrain and complex and hazardous environments, but they still aren’t able to move along narrow ridges.
Now, a team of researchers at Carnegie Mellon University’s Robotics Institute (RI) has designed a system that makes an off-the-shelf quadruped robot nimble enough to walk a narrow balance beam – a feat that is likely the first of its kind.
“This experiment was huge,” said Zachary Manchester, an assistant professor in the RI and head of the Robotic Exploration Lab. “I don’t think anyone has ever successfully done balance beam walking with a robot before.”
By leveraging hardware often used to control satellites in space, Manchester and his team offset existing constraints in the quadruped’s design to improve its balancing capabilities.
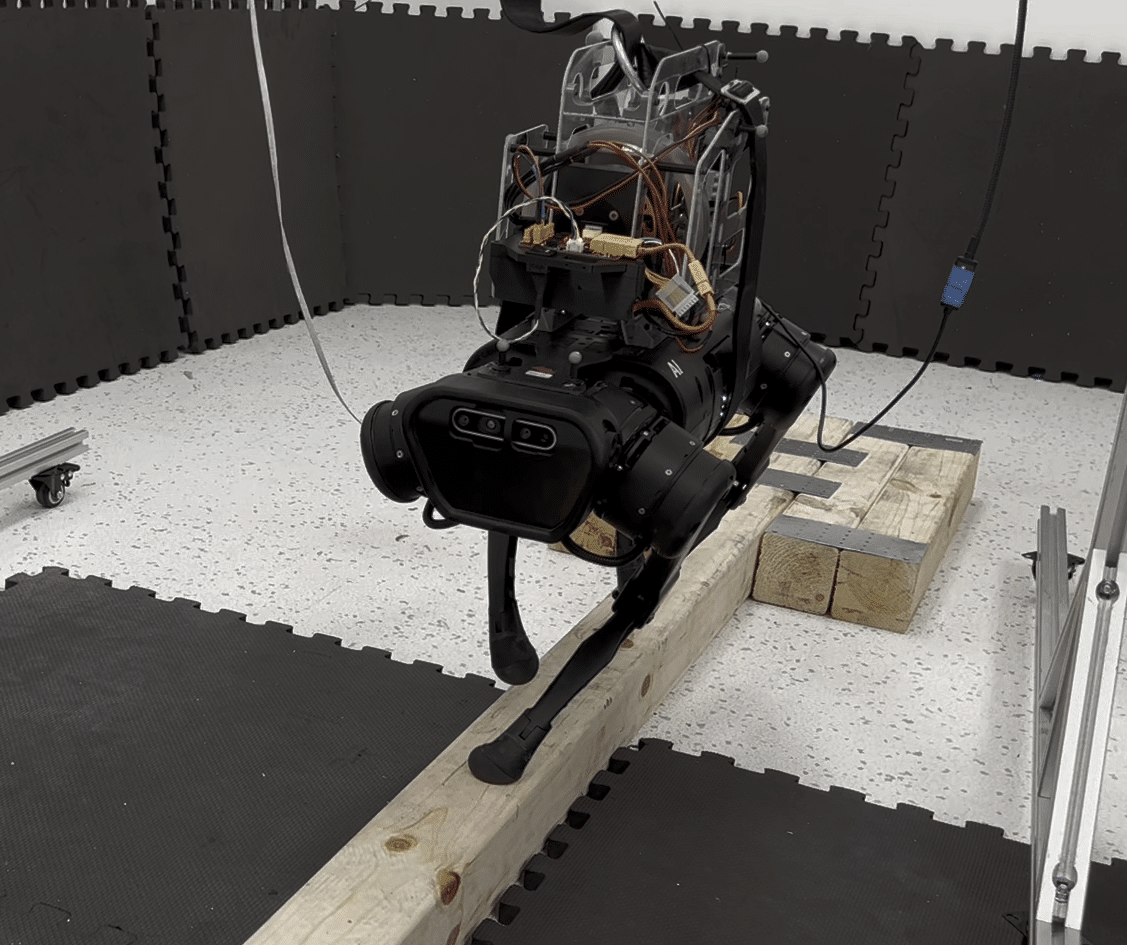
The team’s solution employs reaction wheel actuators (RWA) that are widely used in the aerospace industry to perform attitude control on satellites by manipulating the angular momentum of the spacecraft. Researchers developed a proof-of-concept RWA module that can be attached to the back of a standard Unitree A1 robot – one on the pitch axis and one on the roll axis – to provide additional angular momentum control. The 4.3-kg module is compact, reusable, and has high control bandwidth.
With the help of a novel control technique, the RWA allows the robot to balance independently of the positions of its feet. With the RWA, it doesn’t matter if the robot’s legs are in contact with the ground or not because the RWAs provide independent control of the body’s orientation.
“You basically have a big flywheel with a motor attached,” said Manchester, who worked on the project with RI graduate student Chi-Yen Lee and mechanical engineering graduate students Shuo Yang and Benjamin Boksor. “If you spin the heavy flywheel one way, it makes the satellite spin the other way. Now take that and put it on the body of a quadruped robot.”
Researchers say it was easy to modify an existing control framework to account for the RWAs because the hardware doesn’t change the robot’s mass distribution, nor does it have the joint limitations of a tail or spine. Without needing to account for such constraints, the hardware can be modeled like a gyrostat and integrated into a standard model-predictive control algorithm.
The system was tested with a series of successful experiments that demonstrated the robot’s enhanced ability to recover from sudden impacts. In the simulation, they mimicked the classic falling-cat problem by dropping the robot upside down from a height of nearly half a meter, with the RWAs enabling the robot to flip itself around in mid-air and land on its feet.
On hardware, they showed the robot’s ability to recover from disturbances – as well as the system’s balancing capability – with an experiment where the robot walked about 3-meter (9.8-ft) length of a 6-centimeter-wide wooden balance beam.
Manchester predicts that quadruped robots will soon transition from being primarily research platforms in labs to widely available commercial-use products. With continued work to enhance a quadruped robot’s stabilizing capabilities to match the instinctual four-legged animals that inspired their design, they could be used in high-stakes scenarios like search-and-rescue in the future.
“Quadrupeds are the next big thing in robots,” Manchester said. “I think you’re going to see a lot more of them in the wild in the next few years.
Satellite tools help quadruped robots walk a narrow balance beam
Source: Tambay News








0 Comments