

Soft robots have attracted wide attention in biomedical engineering, surgical assistance, prosthetics, and others. A lot of inspiration for soft robotics has been taken from the natural world, such as octopuses, snakes, and caterpillars.
Now, the engineering team at North Carolina State University has developed an energy-efficient crawling robot inspired by caterpillars that can move forward, backward, and dip under narrow spaces.
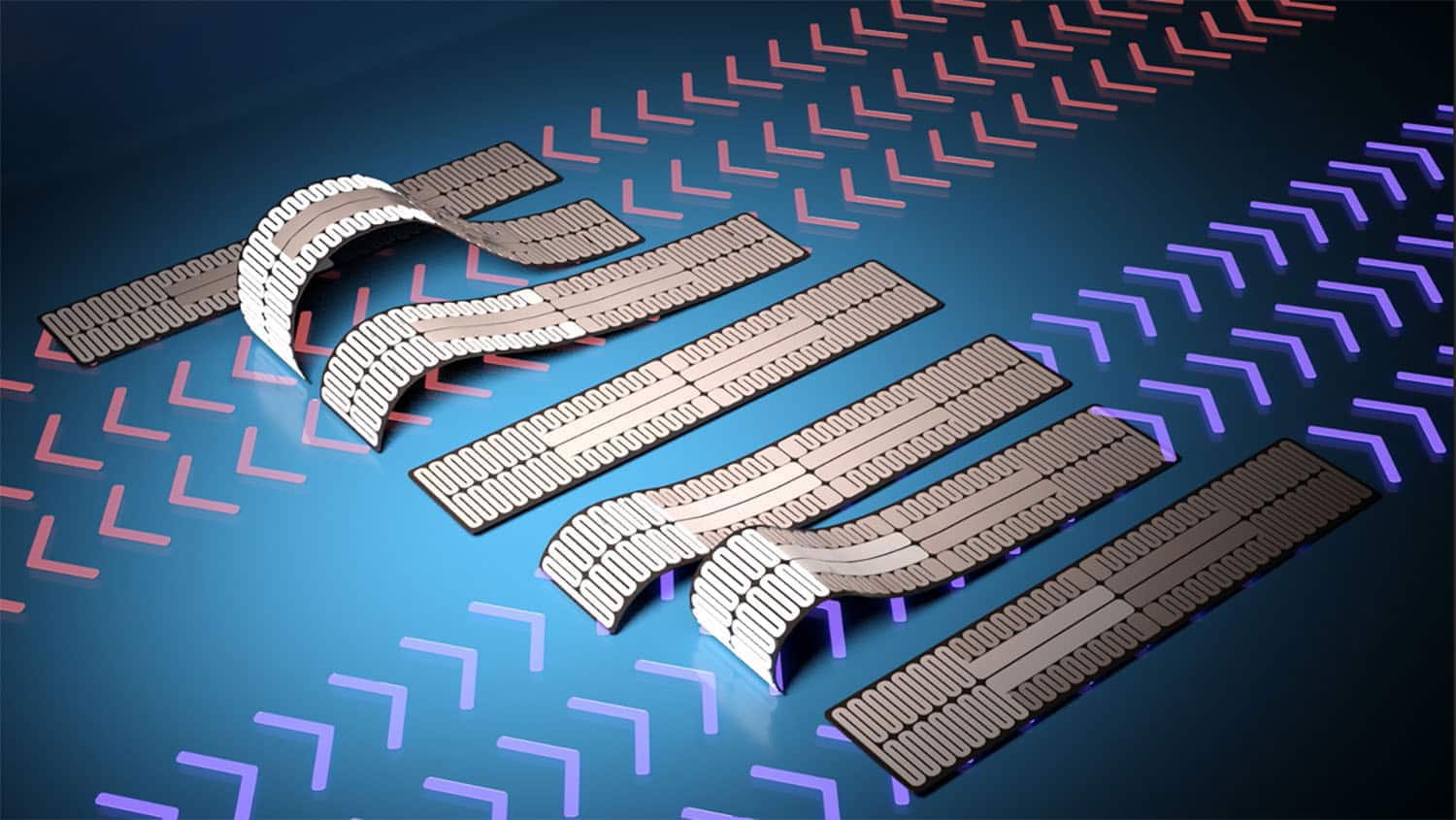
The 9-cm-long soft-bodied robot is modeled after the caterpillar of the mother-of-pearl moth, Pleurotya ruralis. The robot’s movements are driven by a novel pattern of silver nanowires that use heat to control the way the robot bends, allowing users to steer the robot in either direction.
“A caterpillar’s movement is controlled by local curvature of its body – its body curves differently when it pulls itself forward than it does when it pushes itself backward,” says Yong Zhu, corresponding author of a paper on the work. “We’ve drawn inspiration from the caterpillar’s biomechanics to mimic that local curvature and use nanowire heaters to control similar curvature and movement in the caterpillar-bot.
“Engineering soft robots that can move in two different directions is a significant challenge in soft robotics,” Zhu says. “The embedded nanowire heaters allow us to control the movement of the robot in two ways. We can control which sections of the robot bend by controlling the pattern of heating in the soft robot. And we can control the extent to which those sections bend by controlling the amount of heat being applied.”
The caterpillar-bot’s body is made of two stacked layers of different polymers, which respond differently when exposed to heat. The top layer expands when exposed to heat, while the one on the bottom contracts when exposed to heat. Embedded in the top layer of polymer is a pattern of silver nanowires, which includes multiple lead points along the length of the robot.
By applying an electric current to different lead points, the researchers can control which sections of the nanowire pattern heat up and can control the amount of heat by applying more or less current.
“We demonstrated that the caterpillar-bot is capable of pulling itself forward and pushing itself backward,” says Shuang Wu, first author of the paper and a postdoctoral researcher at NC State. “In general, the more current we applied, the faster it would move in either direction. However, we found that there was an optimal cycle, which gave the polymer time to cool – effectively allowing the ‘muscle’ to relax before contracting again. If we tried to cycle the caterpillar-bot too quickly, the body did not have time to ‘relax’ before contracting again, which impaired its movement.”
In addition, the researchers demonstrated that the caterpillar bot’s movement could be controlled to the point where users were able to steer it under a very low gap – similar to guiding the robot to slip under a door. In essence, the researchers could control the both forward and backward motion as well as how high the robot bent upwards at any point in that process.
“This approach to driving motion in a soft robot is highly energy efficient, and we’re interested in exploring ways that we could make this process even more efficient,” Zhu says. “Additional next steps include integrating this approach to soft robot locomotion with sensors or other technologies for use in various applications – such as search-and-rescue devices.”
Journal reference:
- Shuang Wu, Yaoye Hong, Yao Zhao, Jie Yin, and Yong Zhu. Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation. Science Advances, 2023; DOI: 10.1126/sciadv.adf8014
Caterpillar-like soft robot can dip under narrow spaces
Source: Tambay News








0 Comments