

A team of researchers from Hanyang University and Inha University has introduced the collective behavior of multiple swimming robots for the delivery of thousands of floating microplastics and heavy semi-submerged objects by generating a water vortex.
Collective behavior is a common phenomenon in groups of ants, fish, and birds in the natural world. Numerous living creatures organize to complete complicated tasks, navigate through harsh environments, and defend against predators. Recently, nature-inspired robotic collectives have been devised to accomplish tasks that are difficult to perform with a single device.
A single cargo can be transported by delicate grasping and releasing motions of a single gripping device. However, gripping devices themselves have presented difficulties in transporting a large number of cargo rapidly and simultaneously. A gripper robot grips, transport, and release cargos one by one – which is time-consuming.
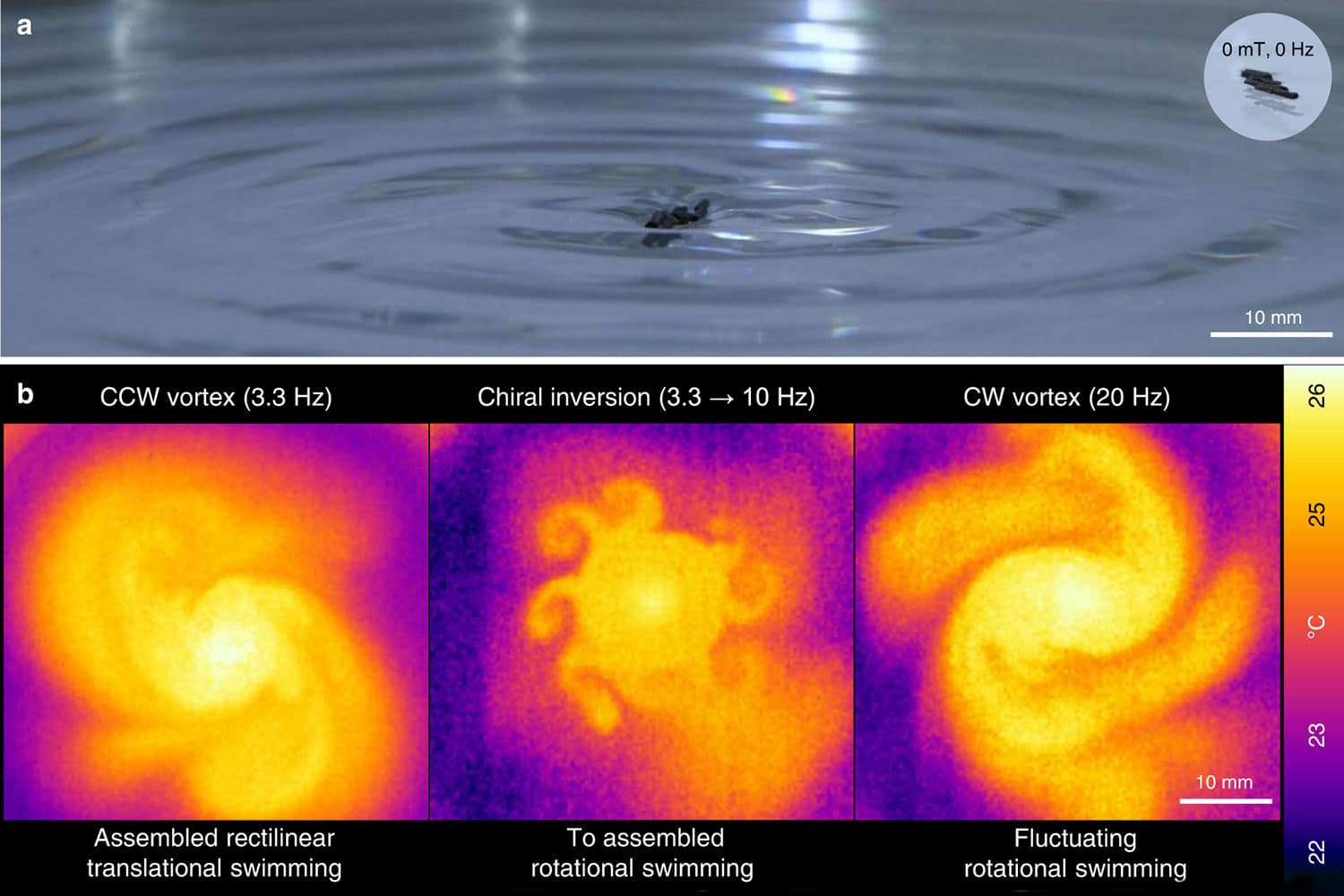
Jeong Jae Wie, Associate Professor at the Department of Organic and Nano Engineering at Hanyang University, and the team addressed this issue through a vortex-induced transportation strategy using multiple robotic actuation. They report multimodal collective swimming of ternary-nanocomposite-based magnetic robots capable of on-demand switching between rectilinear translational swimming and rotational swimming.
The nanocomposite-based magnetic robots comprise a stiff yet lightweight carbon nanotube yarn (CNTY) framework surrounded by a magnetic polymer composite, which mimics the hierarchical architecture of musculoskeletal systems, yielding magnetically articulated multiple robots with an agile above-water swimmability (about 180 body lengths per second) and modularity.
When multiple robots swam above water with agile rotational swimming motions, they could generate a vortex, and thousands of floating microplastics and heavy semi-submerged millimeter-scale cargos could become trapped in the vortex. These trapped microplastics were then transported and collected by moving multiple swimming robots.
Before delivering thousands of floating microbeads into a partitioned space, the research team was able to block microbeads from entering inward by switching the actuation mode of the robots from rotational swimming to rectilinear translational swimming.
The controllable collective actuation of these biomimetic nanocomposite robots can lead to versatile robotic functions, including microplastic removal, microfluidic vortex control, and transportation of pharmaceuticals.
Journal reference:
- Sukyoung Won, Hee Eun Lee, Young Shik Cho, Kijun Yang, Jeong Eun Park, Seung Jae Yang and Jeong Jae Wie. Multimodal collective swimming of magnetically articulated modular nanocomposite robots. Nat Commun 13, 6750 (2022). DOI: 10.1038/s41467-022-34430-2
Collective swimming of multiple robots for transportation of microplastics
Source: Tambay News








0 Comments